The Garage Podcast : S2 EP7
Amir Bar-Niv of Marvell Automotive
Amir Bar-Niv, VP Marketing and Business Strategy for Marvell Automotive joins Sonatus Chief Marketing Officer John Heinlein, Ph.D to give a masterclass in the evolution of vehicle networking and particularly the shift towards an all-ethernet vehicle. In this insightful episode we touch on zonal architecture, cybersecurity, the diversity of vehicle networks, Marvell’s automotive strategy and much more.
Listen to audio only version:
Episode Transcript | Amir Bar-Niv of Marvell
Table of Contents
Overview
JOHN: Today in The Garage, Amir Bar-Niv from Marvell. Let’s go.
JOHN: Welcome to The Garage. I’m John Heinlein, Chief Marketing Officer from Sonatus. We hope you’ve been enjoying season two of The Garage. And we’ve posted episodes from the Consumer Electronics Show 2024. If you missed those, please check those out at YouTube or wherever you find your podcasts. And we encourage you to subscribe to our feed to see new episodes when they come. Today, we’re excited to welcome our special guest from Marvell, Amir Bar-Niv, who is Vice President of Marketing and Business Strategy for Marvell Automotive. Amir, welcome to The Garage.
AMIR: Thank you, John. Great to be here in this fascinating garage.
JOHN: Thank you so much. We also have a special guest today. In addition to yourself, those devoted listeners of our show will have seen a Genesis GV60 here in The Garage with us. But today we have something new. Our new special guest is this beautiful Hyundai IONIQ 6, which is one of the over a million vehicles today and growing rapidly in production with Sonatus’ technology. So devoted listeners will see the IONIQ 6 in the episodes to come here in season two. But now, Amir, back to you. Tell us a little bit about you and your background, and your role at Marvell.
Meet Amir Bar-Niv
AMIR: I joined Marvell about four and a half years ago with the acquisition of Aquantia, okay, where we developed some of the technologies like the multi-gig Ethernet and the bridges that are used today under the Marvell portfolio. And my role, as you said, is running VP Marketing and Business Strategy for the Automotive BU at Marvell.
JOHN: For our listeners who may be less familiar with Marvell, can you tell us a little bit about Marvell and the scope of products it covers and your strategy in automotive?AMIR: Marvell is a semiconductor company, you know, exists for over 25 years now, and they’re doing product for Datacenter, Enterprise, Carrier, and automotive. Specifically for the automotive, we are currently mainly focused on Ethernet products that are used for the in-vehicle network like switches, PHY, bridges. Marvell in general has other IPs and technologies that we are going to leverage for the automotive, you know, later, including compute, security, storage. So it’s going to be a wide range of products for automotive, which is a very fast-growing business in Marvell. Probably one of the fastest growing right now.
JOHN: Fantastic. And Marvell’s headquarters is just down the road from us. It’s just down Highway 237, if you are familiar with Sunnyvale and the area. In Santa Clara. So before we get into the meat of our discussion, we always like to get to know our guests. And I always like to ask our guests to tell us something interesting about you, about your background that people may not know about you.
AMIR: Okay. So to start on my professional background, I’m in the PHY business. I would say, you know, since I started my career, PHY and switches, communication, okay, that were more in Enterprise. And then I moved to automotive about seven years ago. Personally, when I’m not working, you know, I try to spend a lot of time with my family, my wife and kids, and whenever they don’t want to be with me, that’s my spare time to do some sports, running, lifting weights, playing basketball, watching the Warriors. Although this year it’s a heartbreaking experience. But overall, I try to fill in my time with doing sports and meeting friends.
JOHN: That’s great. I always like to share some fun fact about me and I always have to come up with a new fun fact every time. My wife and I are big fitness people, especially runners. And so I’ve done many half marathons. Many 10ks, have even done a half Ironman triathlon. So there’s my fun fact for the day.
Amir’s perspective on SDV
So the focus of The Garage Podcast and of Sonatus’ software-defined vehicles and advanced vehicle technologies and Sonatus has been working with Marvell for many years now, especially around your switches as we work to help to develop the infrastructure inside vehicles. So I’d love you to tell us a little bit about, you know, your take on vehicle infrastructure and how it’s evolving and some of the things you’re working on for vehicle infrastructure.
AMIR: Okay, great. So software-defined vehicle, it’s a big thing for us, for Marvell. Okay. We really believe in this megatrend. The main reason is that all the stakeholders really enjoy this megatrend. To start with the OEM, for them, it’s a new stream of revenue after they already sold you the car. When you want to download new applications over the air. They estimate, by the way, this market to be something in the range of $450 billion per year. And everyone wants to take a share of it. Okay. For the car owner, it’s also a big thing, you know, because now it helps you to maintain the value of the car over time. You buy the car now and two years from now you’ll download a very important application that, for example, upgrades the car from a level two to a level three autonomous car, and all of a sudden you increase the value of your car when you want to sell it. And then also for the carrier provider, it means a lot of bandwidth that will need to be driven to the car and from the car. So everyone enjoys this megatrend and this is why we believe this has to happen. And we are working today already on the architectures of this type of platforms for the in-vehicle network to support the software-defined vehicle. So it means for us when we talk on software-defined and the product, it really means three things for us. First, the bandwidth we need to- Now when we talk on this car, it’s going to have more cameras, especially when it’s, you know, autonomous level going from level two, level three. They need to have more cameras, more RADAR, more LIDAR. The bandwidth in the car is going to grow. The backbone is upgrading from gigabit to ten gigabit and even 25 gigabit. So the switches and the PHY that we are giving…providing to the market need to support this bandwidth. Then it’s security. Security is a very important part of software-defined vehicle and we need to make sure we have the right security features in our switches and in our PHYs. And then the last one is probably the flexibility to be able to shape the traffic inside the network of the car to serve new applications better over time. And that’s part of our offering and the capabilities that we have, especially in our switches.
JOHN: Yeah, that last topic is funny because you and I wrote a blog last year, as you may recall, about this flexibility aspect and the idea of a static vehicle network that you never reconfigure is fundamentally the opposite of what software-defined vehicle needs and wants.
AMIR: Correct.
JOHN: And the ability to add these capabilities after shipment is so important.
AMIR: Yes.
Safety and cybersecurity
JOHN: And I think you mentioned cybersecurity, and I think safety is also a critical aspect as well. Time-sensitive networking is integral to this as well.
AMIR: Absolutely. So start with the safety. You know, every component that we ship today to the market needs to be, to this market, needs to be at least ASIL-B. You know, that’s the requirement of ISO 26262 from our customers. In order for them to build a network that eventually would be ASIL-D. With regard to timing and quality of service. Then TSN is extremely important features. It started as AVB and now it’s the TSN standard, right? That we also integrate in all our PHYs and switches. And then when we talk on security, then there is a few layers that we are adding in our hardware. Okay. Of course, there are other layers to tend- handled by, for example, for what you’re doing on the software, but in the hardware, the minimum, we need the MACsec. You know that makes sure that the links are fully authenticated and data is encrypted whenever it’s needed. It’s including inside the switches, a TCAM that we’re using for real-time filtering like whitelisting and blacklisting.
JOHN: Right.
AMIR: HSM module that is used to generate and manage keys for the network. So all these securities are part of our switches and we are adding more and more features over time. When we come with newer generations.
JOHN: That’s fantastic. We kicked off a podcast a few months ago called Driving Innovation, where we dig a little deeper into vehicle technologies, and one of the first episodes we did was on vehicle networks, MACsec, and other things. So if you’ve not seen if our guests have not seen the Driving Innovation podcast, take a look at that. And we talk a lot about those important technologies you mentioned. And Sonatus has been developing a product called Sonatus Foundation, which helps to configure vehicle networks and helps our customers to be able to dynamically change vehicle configuration policies, be able to dynamically adjust, for example, cybersecurity, you mentioned whitelisting, blacklisting. Those are critical. As a cybersecurity threat is determined, you may realize “Ah, I’m able to block that” if I’m able to isolate this port or this service. So it’s really important and we’re glad to be partnering with Marvell.
The shift to zonal architecture
Another important topic that we talked about was the shift from domain controller architecture to zonal architecture. And I think just in general, this consolidation of the vehicle EE architecture, I’d love to get your perspective on how you see the vehicle EE architecture evolving.
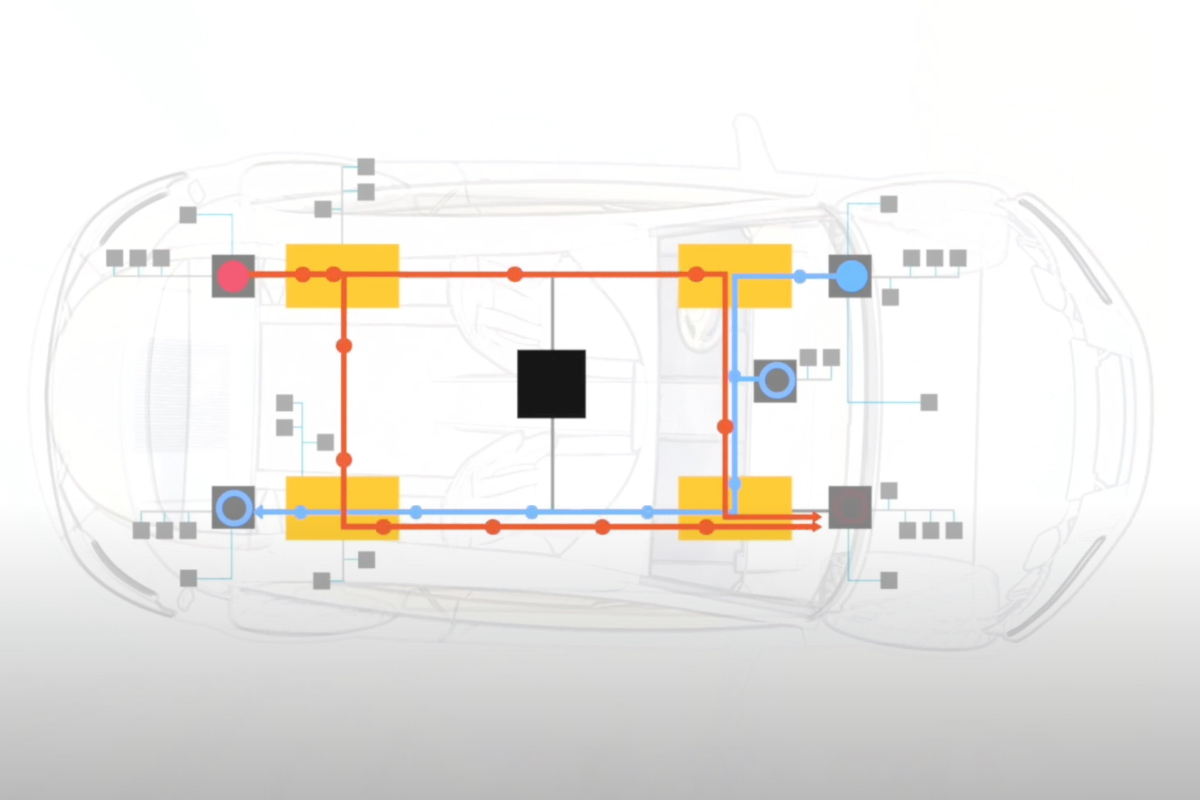
AMIR: I think when we think of the evolution of the cars, usually what we show to our customers is that until I would say 2015, the car was what’s called device-centric, meaning you had simple, different systems like G.P.S., you know, radio, CD. Each one was an individual system. There was not really a network in the car between those systems to exchange data and information. From 2015, the market shifted into the domain architecture where we divided the car to domains. Okay. Domains are, for example, ADAS, infotainment, body. Each domain has its own controller or processor, and it was connected to all its agents around the car with different types of networks. The net-net, the issue here with domain architecture was the cable harness. You had to run cable back and forth in the car-
JOHN: Especially if the sensor for the body controller is on the other side of the car.
AMIR: Exactly. And each domain has its own cables and its own network. Okay. So VW gives a nice example of the GT. You know, it’s a mid-sized car, you know, and they said that the total length of cable in the car is more than 1.5 kilometers.
JOHN: It’s incredible to think about that.
AMIR: It’s crazy. It’s crazy. It means cost. Okay. First of all, to install those cables, it needs to be done by a human. You know, you can have robots supporting the engine, the doors and everything, but to run those cables, you really need people to do them. So it’s very expensive you need to maintain a big inventory of cables. It’s the weight. When you’re talking about an electrical vehicle, then it’s the weight of the cable. This is the third heaviest component in the car after the chassis and the engine.
JOHN: Yeah.
Automotive ethernet
AMIR: So the industry very quickly identified and understands that this is an issue and this is when you start to develop the concept of zonal architecture. Zonal architecture means that you divide the car into zones, geographical zones, like front, center, back. In each zone you have a switch that aggregates the traffic from the agents of all the domains and converts it to ethernet. So the backbone of the car is high-speed ethernet that’s run on a thin, single cable. Okay. And that really helps to reduce the total number of cables, the length of the cables in the car. Now, this transition is very important for us, Marvell, as the ethernet provider because now the whole backbone, okay, in the car, we used to have many different protocols, like MOST, Flexray, you know, CAN, and now everything is moving, especially in the backbone to be ethernet.
JOHN: Right.
AMIR: And you need to have the switches that can aggregate all this traffic and the PHY that can carry the aggregated data, high-speed aggregated data over these thin Ethernet cables. And this is exactly what Marvell is doing. And these are the products that we are providing in order to serve the current market of domain architecture, but also the future market of zonal architecture that will start pretty soon. We have a survey that I mentioned to you in the past showing that by 2026, 80% of the OEMs said that they’re going to start having zone architecture at least on one car model. And by 2029 it will be 96%.
JOHN: Yeah.
AMIR: So it’s not a matter of if anymore, it’s just a matter of how quick the market is moving into zonal architecture.
JOHN: Absolutely. I think this zonal shift is a really valuable change that just makes engineering sense. If you think about- If I give you a blank sheet of paper and I said, “Draw the architecture of a car,” you would never design it the way cars have been done based on what we know today. It was done that way because we had to before it was done that way. The technology was different, the electronics were different, the network protocols weren’t there. But now we have so many more tools at our disposal to design it without a clean sheet of paper, but maybe a sensible evolution. And it’s so incredible. I’ve heard this statistic before, but third heaviest component in the car. Engine, chassis, and wiring. I mean, that probably is incredible for people to think about it if they don’t know. And so the ability to attack that and reduce that weight, improve manufacturing cost is compelling. I think it also lends itself to this idea of reconfigurability, because if you have this now network that’s more flexible, reconfigurable, the ability—and this is actually what we wrote about in our blog last year—the ability to connect, for example, a camera source or some other sensor source to another controller that wasn’t previously talking to it. But now there’s a new capability like some security feature or something like that is now possible.
AMIR: Yep, yep. And you can do it over the air. So, you know, most of our components, especially the switches, you can upgrade the firmware to those switches, you know, and reshape some of the traffic in them by downloading over the air in new firmware. Okay. That can be authenticated and securely written into external flash. So yeah, this is part of the offering and this is part of the capability of software-defined vehicle that is based on zonal architecture.
Standardizing on ethernet
JOHN: Right. Now, my understanding—and I’d be curious on your perspective on this—is that the local communication today is probably based on CAN now, CAN coming to the zonal controller or other things. But my impression is that there’s also an evolution…you talked about the high-performance backbone of the car. There’s also a shift towards, I think, lighter weight, lower bandwidth, Ethernet connections to sensors. So, for example, cameras used to be connected by different protocols and now we’re potentially moving towards automotive Ethernet. Can you talk about this hybrid Ethernet approach? Do you see that shifting in cars as well?
AMIR: Absolutely. So I will talk on CAN in a second because I think that’s an interesting topic by itself. But cameras today are connected to the SOC with proprietary technologies. We call them LVDS like GMSL from Maxim now ADI or FPD-Link from TI. And the reason for that is that cameras drive uncompressed video that needs the right, you know, bandwidths of a few gigabits per second.
JOHN: And it’s constant.
AMIR: And it’s growing.
JOHN: Right.
AMIR: It’s growing all the time.
JOHN: Right.
AMIR: Ethernet until lately, the highest speed that you can serve in the car was a gigabit.
JOHN: Right.
AMIR: Okay. 1000BASE-T1. So ethernet could not serve this market. And that’s a reason that OEMs went to use those proprietary technology. Point-to-point technology. However, Ethernet now has new solutions and new PHYs for up to ten gigabits per second and soon even 25 gigabits per second, T1, on the single pair full duplex. And with this technology, you can now run the uncompressed video from the camera over ethernet. So Marvell introduced, we were the first one to introduce to the market the bridge that converts the camera interface, which is MIPI, into Ethernet. 10 Gig T1. And then you can connect it either to the zonal switch with a very short cable and save the need for a long cable, multiple inline connectors all the way to the SOC.
JOHN: Right.
AMIR: Or if needed you can connect also to the central switch. You have a lot of flexibility once the output of the camera is ethernet. And in addition, now you can enjoy all the benefits of ethernet that goes all the way to the camera, Okay, like power-over-cable, virtualization, you can send multiple streams from the camera to different destinations. You can easily share cameras between domains. Until now, you needed to have separate cameras for ADAS and infotainment because it was all point-to-point.JOHN: Right.
AMIR: Now you can watch everything in the network, you have a central switch and you can send…you decide which camera is going to the ADAS SOC, and which cameras are going to the infotainment SOC. This can be done very easily with Ethernet and you can dynamically change this also because it’s just changing, you know, the addresses in the switches. So Ethernet has a lot of advantages for cameras over ethernet and other sensors. By the way, RADAR and LIDAR are already over ethernet because they need their lower speeds today.
JOHN: Right.
CAN evolving to ethernet
AMIR: But really the vision eventually is Ethernet end-to-end in the car. And going back to your point on CAN-
JOHN: Right.
AMIR: CAN is used for lower speeds. Okay. Like actuator, control doors or whatever you need. Today there is another version of Ethernet that is the 10BASE-T1S, which is 10 Meg ethernet, that was just announced in the market in the last few years and we are supporting this in our switches that can potentially replace some or eventually maybe all the CAN ports inside of the cars. So then it’s really going to be Ethernet end-to-end for every device in the car.
JOHN: I think it’s a very powerful and exciting thing. And I want to highlight for our listeners who might be thinking, well, when I think about Ethernet or maybe the average person. You know, you have this cable, you plug into your computer, it’s got four twisted pairs, eight wires inside, some shielding, whatever. But you’re also saying that there’s an evolution where now with a single twisted pair, we can get very high bandwidth in cars. So think about the- From a wiring perspective- You talked about the wiring harness, right? Think about the ability to now have a much more streamlined wiring harness. Only two wires and a very thin cable to handle the traffic of many kinds of things in the car. I think it’s very powerful.
AMIR: Correct.
JOHN: And then, of course, you add on top of it the ability to manage it with software, manage these, the protocol configurability you mentioned, share those things appropriately, securely, appropriately to different domains and different subsystems is very powerful.
AMIR: Correct. Yeah. And I have to say that this is some of the challenges that we had for the automotive. Because you need to run the very high-speed ethernet like 10Gig and soon 25Gig on a single pair full duplex under the EMC environment of automotive that we know is 10 to 100 times worse than what you see in datacenter and other industries. Okay. But again, Marvell was able to solve all these problems and our product today can run error-free in this environment of, you know, “Rush EMC” in automotive. And this is what our customers are adopting, you know, the PHYs and the switches that can drive this speed.
Marvell’s wide roadmap
JOHN: That’s great. And it’s interesting to hear that you’re able to with your switch handle these kinds of hybrid port types, I think higher speed and lower speed and you’re able to handle that with your switches in a unified way, correct?
AMIR: Correct. So I think one of the advantages of Marvell in the market today is what we call…we are a one-stop shop, meaning we have switches that support all the speeds from 10 megabit to 10 gigabit, including PCIe ports that are on those switches. And we have all the PHYs that are running from 100 megs, gigabit, 2.5 gig, 5 gig, 10 gigabit. So basically we have all the components that customers need in order to build, today, domain architecture platforms, and in the future, the zonal architecture. And we also introduced a new central switch for zonal architecture called Jasper. And the part number is Q6223, which is a 90 gigabit-per-second switch that can aggregate – more than, I think, twice than anything close to it today in the market—So very high-end and high bandwidth switch that is used as the central switch in the zonal architecture that can aggregate the traffic from all the zones that we were talking about and be able to drive the data securely and safely into the SOCs in the car.
JOHN: Yeah, because we’ve been talking so far about the zonal part and this kind of, if you will, quadrant or section of the car. But you’re right, once you have that into those zones, then they need to go centrally to then be rerouted to the other parts of the car they need to go to. So you need both. It’s almost like a hierarchical architecture in a way. Major central switch, switches in the zones, and then even potentially other smaller things throughout the vehicle.
AMIR: Correct. And that’s a zonal architecture. That’s the promise of a zonal architecture.
Marvell’s focus on automotive
JOHN: Well, this portfolio of products you’re talking about sounds incredible. I’m wondering, automotive, is it an important market for Marvell? Are you focusing in that area?
AMIR: Oh, absolutely. It all started really, when the new CEO of Marvell, Matt Murphy, joined Marvell-
JOHN: I know Matt, he’s fantastic.
AMIR: Yeah. So when Matt joined Marvell, Marvell didn’t do much in automotive. Marvell came from this world. He understood this work very well. He knew the potential of automotive. And basically, he hired a very talented GM, Will Chu, to start the business in Marvell for the automotive. And I guess everything else is history right now. Okay. This is the fastest-growing business in Marvell right now.
JOHN: That’s great.
AMIR: Now we are investing heavily in this one. You know, increasingly the team size. It’s the portfolio of the products. It’s the number of customers that we are serving. We’re doing very well in the market. Okay. I believe that in a couple of years, we will be the biggest semiconductor company for in-vehicle network components. So, yeah, the future looks bright for Marvell in Automotive.
JOHN: Yeah, that’s fantastic. I know Will Chu really well, we’ve been working together for years. He spoke about Sonatus last year for CES, so we have a wonderful relationship with him and yourself.
OEM focus areas
I wonder if we step back. Big picture. One of the things that’s very important these days for OEMs is differentiating their vehicle design, their vehicle architecture. What are the key things that you think OEMs are focusing on as you talk to customers to differentiate?
AMIR: So I think the need for differentiation is stronger than ever before, especially when you’re talking about an electric vehicle. You know, the EV. This is what we call the battery on wheels or the skateboard approach. Everyone builds a battery, they have the engines, but there is not much differentiation. Okay. So some of them try to differentiate with the range of the car. Okay. But that’s not really differentiation because if you want to buy a car that can drive longer with a single charge, you need to pay more. Okay. So that’s usually…And they all talking, you know, an area where between, I don’t know, 200 miles to 600 miles, you know, in those ranges, you know, some people have started talking about a thousand miles you know in a few years. The next I would say, people are talking on acceleration. Can the car get from 0 to 60 miles in three seconds or two seconds? This is not much of a differentiation. Most of the people don’t care about it. Okay. So OEMs realized very quickly that the differentiation comes from the electronics and the software inside the car. Okay. The features, the SDV, you know, the software-defined vehicle that we talked about or the autonomous level in the car. So they’re investing a lot in defined- in developing platforms, okay, that has enough components, enough processing capabilities, and enough software in order to create new applications to make the car more attractive to the user. Okay. And this thing where it’s thought to be very interesting because there is a lot of room for innovation in these future cars. And OEMs don’t always- Cannot always develop all the innovation by themselves because there is so many- If you think on a car owner, okay, a few years ago the only consideration you had for a car, okay, if you want to buy a car is the size of the car, the horsepower, you know, the finish. But that’s it. You know, the model. Now you need to decide which engine you want to have. Is that going to be a combustion, a hybrid, an electric car? W hat is the autonomous level? Is it level one, two, two plus, three? Is it going to be- in the future- is it going to be an SDV car? So there is a lot of permutations for those platforms. And the OEMs, in order to serve them, they need to work very closely with the semiconductor companies and the software companies like you in order to be able to answer or to serve all those permutations in the market. So we are engaged with customers at a very early stage and we are tailoring our products to their future architecture based on their future needs. Okay. So that makes, you know, all this journey way more exciting than it was ever before.
Ongoing driver engagement
JOHN: Absolutely. And I think ongoing driver engagement you mentioned, I think is something we’ve been talking about a lot on the podcast, that the ability to have ongoing connection to the driver after sale, ongoing improvements that the driver feels maybe affinity and real strong connection to the vehicle like they feel to their phone, they feel like it’s really connected to them. I think that’s important. Yeah. We also talked before that these products you’re designing, and you talked about this incredible roadmap of products, You’re not designing these in a vacuum. I mean, you’re really getting this feedback directly from OEMs about their requirements. You know, you had- You’re hearing this consistent feedback from across the industry?
AMIR: Absolutely. As a matter of fact, that’s another interesting transition that you’re seeing right now in this industry, when OEMs take more ownership because they want to control their destiny. So if you look, you know, five, ten years back, OEMs were defining the system- the features that they want to have, and then they give their requirements to the Tier 1 that designed the system for them and wrote most of the software. And then the OEMs integrated the different systems in the car. Now you see that the OEMs are not only developing the architecture of the system by themselves of their platform, they are also choosing the components and the vendors, okay, which was all done by the Tier 1 previously. And in order to be able to control how the platform will be developed, first of all, between the different tiers and also the transition from one car model to the next one. And you can see a lot of announcements, you know, like VW did with CARIAD and GM, that they are building very big software teams in order to write the software for those cars. So OEMs take ownership on all this and work now directly with the semiconductor guys in order to serve their needs and tailor the product that we are doing for their next-level architecture. So we have these discussions left and right with OEMs.
Conclusion
JOHN: That’s fantastic. You’re really right on the forefront of this evolution of EE architecture and we’re so happy to be partnering with you because you can’t have an EE architecture without software to make it work and we’re excited to be working alongside you. Amir, thank you so much for joining us on The Garage today. I hope you had fun. I learned a lot and I hope our guests learned a lot as well.
AMIR: Absolutely. It’s fun and good luck. I think you guys are doing great and it’s a pleasure working with you, you know, on our future products.
JOHN: Thanks so much. Thank you for joining us today on The Garage. We’re glad to be back in The Garage again and look for more episodes to come. If you like what you’re hearing, please like and subscribe to hear more from us. We’ll see you again soon.
Recent episodes

The Garage Podcast
Doug Newcomb from AVCC

The Garage Podcast
Chiara Delporto of Marelli
The Garage Podcast
Roger Lanctot from TechInsights
Related resources
Modern Networks are the Backbone of SDVs
The rise of Software-Defined Vehicles (SDVs) promises a new era in automotive technology, where vehicles continuously improve and new features…
Modern Networks are the backbone of SDVs
In this first episode of the Driving Innovation podcast, we provide an overview of the challenges and limitations of existing vehicle networks and how modern network technologies, standards and practices can be applied to in-vehicle networks to facilitate software-driven innovation.